Ventili za kontrolu rada motora na praznom hodu – IAC(Aktuator praznog hoda)
Uloga aktuatora praznog hoda je da preko paralelnog (bypass) voda napaja motor s dodatnim vazduhom saglasno sa odstupanjem broja obrtaja motora u praznom hodu od zadane nazivne vrednosti. Jedno od praktično primenjenih rešenja jeste obrtni elektroventil (elektromotor) sa ograničenim uglom zaokretanja od 90 stepeni.
|
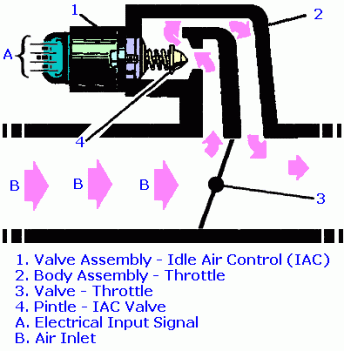
Koriste se kod single point sistema (sa jednim brizgacem) i kod multipoint (pojedinacni brizgac za svaki cilindar).
IAC ventil otvara mali by-pass kanal oko prigusnog leptira u uslovima kad je leptir zatvoren (prazan hod motora) ili je povecano opterecenje motora (ubrzavanje, vuca, ili kad su ukljuceni klima, ili alternator puni vecim naponom od dozvoljenog, ili je automatski menjac u polozaju rucnog kocenja). Povecanjem protoka vazduha koji protice by-pass kanalom povecava se brzina praznog hoda i obratno. 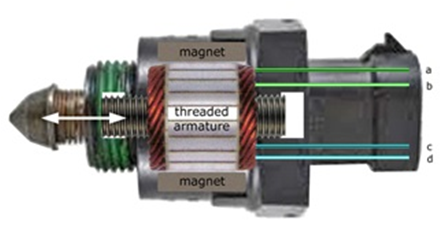
|
|
|
Koriste se kod single point sistema (sa jednim brizgacem) i kod multipoint (pojedinacni brizgac za svaki cilindar).
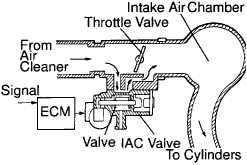
IAC ventil otvara mali by-pass kanal oko prigusnog leptira u uslovima kad je leptir zatvoren (prazan hod motora) ili je povecano opterecenje motora (ubrzavanje, vuca, ili kad su ukljuceni klima, ili alternator puni vecim naponom od dozvoljenog, ili je automatski menjac u polozaju rucnog kocenja). Povecanjem protoka vazduha koji protice by-pass kanalom povecava se brzina praznog hoda i obratno. Ventilom upravlja EKM, koji nadzire brzinu praznog hoda pomocu broja impulsa od modula paljenja u razvodniku paljenja ili senzora pozicije radilice, kada senzor ili prekidac prigusnog leptira daje signal EKM-u da je leptir zatvoren i motor radi na praznom hodu. Kada je brzina praznog hoda visa ili niza od zadate u kompjuterskom programu vozila, kompjuter odredjuje da ventil poveca ili smanji protok vazduha kroz by-pass kanal. Dodatni signali od senzora temperature motora (rashladne tecnosti), prekidac kocnica i senzor brzine vozila se koriste da bi se izregulisala brzina praznog hoda prema razlicitim uslovima rada motora. |

|
|
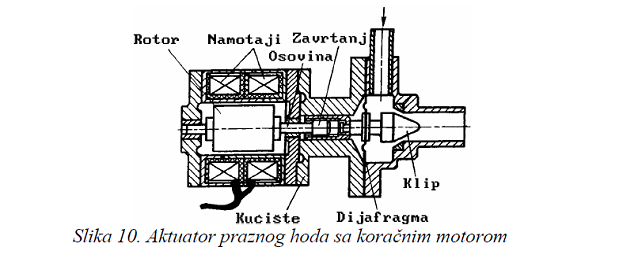
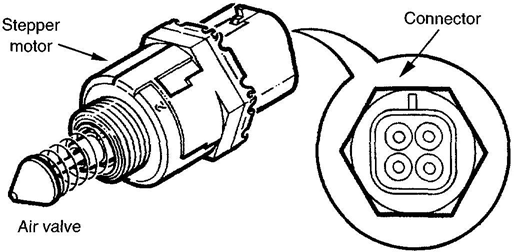
Kada je elektronska upravljačka jedinica sistema za regulaciju praznog hoda rešena digitalno aktuator praznog hoda je moguće realizovati pomoću koračnog motora koji pomera klip kojim se zatvara i otvara kanal za prolaz vazduha.
|
|
Koračni motor
Po svojoj konstrukciji i funkciji koračni (stepper) motor je elektromehanički pretvarač - izvršni organ koji binarno kodirani naponski signal na svom ulazu pretvara u odgovarajući diskretizovani/inkrementalni ugaoni pomeraj izražen u uglovnim inkrementima. Vrednost uglovnih inkremenata je Δα = 3600/Z , pri čemu broj koraka Z, zavisno od konstrukcije motora, može biti u opsegu od 3 do 200. U praksi se koriste dva osnovna tipa koračnih motora, koračni motori sa magnetskim diskom i koračni motor sa promenljivom reluktansom. Šematski prikaz dvofaznog koračnog motora sa dvopolnim rotorom (magnetskim diskom) dat je na slici. Na istoj slici prikazane su i sekvence pobuđivanja za obrtanje u jednom smeru.
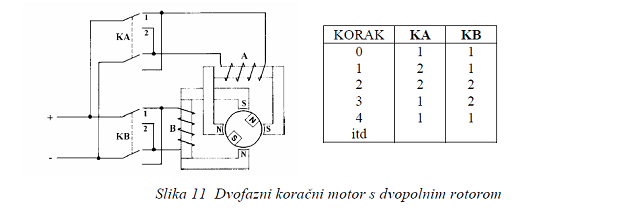
Obrtni moment kod ovog motora ostvaruje se elektromagnetskom silom između magnetskog fluksa rotora i magnetskog polja statorskih polova koji se pobuđuju posredstvom kontakta KA i KB u odgovarajućem redosledu, kako je ilustrovano na prethodnoj slici. Broj koraka po jednom obrtaju motora dat je izrazom
Z = 2 p m
gde su:
p - broj pari polova rotora,
m - broj faza u statoru.
Kontakti KA i KB, koji su pojednostavljeno prikazani na slici, su poluprovodničkog tipa, upravljani pomoću signala generisanih u digitalnim kolima. Kod koračnih motora promenljive reluktanse (sa kandžastim polovima) obrtni moment ostvaruje elektromagnetska sila između pobudnih namotaja statora i kratkospojnog rotora. Broj polova rotora je manji od broja polova na statoru zbog čega polovi rotora ne mogu svi istovremeno da budu naspram polova statora. Od redosleda pobuđivanja statorskih namotaja zavise smer, a od učestanosti pobuđivanja zavisi brzina obrtanja rotora motora.
Koračni motori su u mernim sistemima našli primenu kao pokazivači, na primer, kao odometar na instrument tabli motornog vozila.
Z = 2 p m
gde su:
p - broj pari polova rotora,
m - broj faza u statoru.
Kontakti KA i KB, koji su pojednostavljeno prikazani na slici, su poluprovodničkog tipa, upravljani pomoću signala generisanih u digitalnim kolima. Kod koračnih motora promenljive reluktanse (sa kandžastim polovima) obrtni moment ostvaruje elektromagnetska sila između pobudnih namotaja statora i kratkospojnog rotora. Broj polova rotora je manji od broja polova na statoru zbog čega polovi rotora ne mogu svi istovremeno da budu naspram polova statora. Od redosleda pobuđivanja statorskih namotaja zavise smer, a od učestanosti pobuđivanja zavisi brzina obrtanja rotora motora.
Koračni motori su u mernim sistemima našli primenu kao pokazivači, na primer, kao odometar na instrument tabli motornog vozila.
